

نموذج التعلم العميق لتقليد الروبوت للحركات البشرية.. تفاصيل
قدم الباحثون في U2IS، ENSTA Paris مؤخرًا نموذجًا جديدًا قائمًا على التعلم العميق يمكنه تحسين قدرات تقليد الحركة للأنظمة الروبوتية البشرية, بحسب موقع Phys.
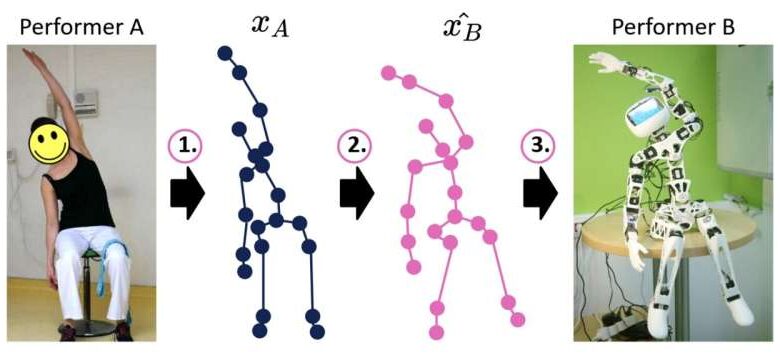
تناول هذا النموذج، الذي تم تقديمه في ورقة بحثية منشورة مسبقًا على موقع arXiv، تقليد الحركة في ثلاث خطوات متميزة، مصممة لتقليل مشكلات المراسلات بين الإنسان و الروبوت التي تم الإبلاغ عنها في الماضي.
تقليد الروبوتات عبر الإنتر نت
“يهدف هذا العمل البحثي في مرحلة مبكرة إلى تحسين تقليد الإنسان الآلي عبر الإنترنت من خلال ترجمة تسلسل المواقف المشتركة من مجال الحركات البشرية إلى مجال الحركات التي يمكن تحقيقها بواسطة روبوت معين، وبالتالي مقيدة بتجسيده.
كتب ساو ماي نجوين في ورقتهم: “من خلال الاستفادة من قدرات التعميم لأساليب التعلم العميق، فإننا نعالج هذه المشكلة من خلال اقتراح نموذج شبكة عصبية لتشفير وفك تشفير يؤدي إلى ترجمة من مجال إلى مجال.”
 التعليم العميق وتقليد الروبوتات" width="1232" height="928" />
التعليم العميق وتقليد الروبوتات" width="1232" height="928" />
طريقة تقليد الروبوتات؟
يفصل النموذج الذي طوره لويس عنابي وما ونغوين عملية تقليد الروبوت البشري إلى ثلاث خطوات رئيسية، وهي تقدير الوضعية وإعادة توجيه الحركة والتحكم في الروبوت.
أولاً، يستخدم خوارزميات تقدير الوضعية للتنبؤ بتسلسلات مواضع المفصل الهيكلي التي تدعم الحركات التي أظهرها الوكلاء البشريون
. بعد ذلك، يقوم النموذج بترجمة هذا التسلسل المتوقع لأوضاع مفصل الهيكل العظمي إلى أوضاع مشتركة مماثلة يمكن أن ينتجها جسم الروبوت بشكل واقعي.
أخيرًا، يتم استخدام هذه التسلسلات المترجمة لتخطيط حركات الروبوت، مما يؤدي نظريًا إلى حركات ديناميكية يمكن أن تساعد الروبوت على أداء المهمة التي بين يديه.
وكتب الباحثون في ورقتهم البحثية: “لتدريب مثل هذا النموذج، يمكن للمرء استخدام أزواج من الحركات البشرية والروبوتية المرتبطة، ومع ذلك فإن مثل هذه البيانات المقترنة نادرة للغاية في الممارسة العملية، ويصعب جمعها”, “لذلك، فإننا نتجه نحو أساليب التعلم العميق للترجمة غير المقترنة من مجال إلى مجال، والتي نكيفها من أجل إجراء تقليد للروبوت البشري.”
قام عنابي وما ونغوين بتقييم أداء نموذجهم في سلسلة من الاختبارات الأولية، ومقارنته بطريقة أبسط لإعادة إنتاج التوجهات المشتركة التي لا تعتمد على التعلم العميق, ولم يحقق نموذجهم النتائج التي كانوا يأملون فيها، مما يشير إلى أن أساليب التعلم العميق الحالية قد لا تكون قادرة على إعادة استهداف الحركات بنجاح في الوقت الفعلي.
ويخطط الباحثون الآن لإجراء المزيد من التجارب لتحديد المشكلات المحتملة في نهجهم، حتى يتمكنوا من معالجتها وتكييف النموذج لتحسين أدائه.
وتشير النتائج التي توصل إليها الفريق حتى الآن إلى أنه على الرغم من إمكانية استخدام تقنيات التعلم العميق غير الخاضعة للرقابة لتمكين التعلم بالتقليد في الروبوتات، إلا أن أدائها لا يزال غير جيد بما يكفي لنشرها على الروبوتات الحقيقي,. “سيعمل العمل المستقبلي على توسيع نطاق الدراسة الحالية في ثلاثة اتجاهات: مواصلة التحقيق في فشل الطريقة الحالية، كما هو موضح في القسم الأخير، وإنشاء مجموعة بيانات لبيانات الحركة المقترنة من التقليد بين الإنسان والإنسان أو التقليد بين الإنسان والروبوت، وتحسين النموذج “الهندسة المعمارية من أجل الحصول على تنبؤات أكثر دقة لإعادة الاستهداف”.



